

Basic technologies
Single-view object tracking
The basis of all image processing and video analytic tasks of IDENTRACE is the determination of moving shapes in camera images. This is accomplished by synthesizing the background for every camera view and by extracting (segmenting) shapes which are different from this background.
Background synthesis is done by continuous statistical analysis of the surveillance camera images to determine its static parts. Having a robust background information (the frame in the middle of the image below) we can do shape segmentation on a frame-by-frame basis by picking the areas which are different from the background on the actual frame (shown in the right side of the image below).

Multiple-view object tracking
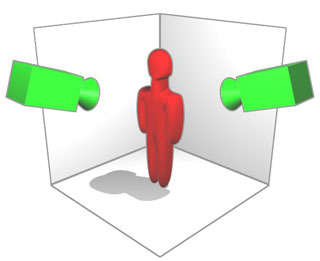
The uniqueness of IDENTRACE lays in the fact that it steps beyond above described camera-level processing, and fuses the information from different cameras to gain better understanding of the monitored area. The next step in achieving this is the multiple-view processing used in the scene-level intelligence by collecting information from cameras with overlapping view-ports over the commonly observed area.
The spatial position of objects that are present in the area is calculated by the multiple-view object tracking technology of IDENTRACE based on the shapes that are the projections of these objects on the different camera views.
Both technologies are integrated in Object Tracking Station (OTS).
More technologies
Basic technologies
Identity tracking
Shopping cart tracking
Remote identification
3D world modelling
Virtual zones
Recognition of suspicious activities